
Imprimir STL Moveo modificado 6 Axis Robot Arm (Bcn3d_Moveo)" melhorado " Modelo 3D - 2146252
Things 3D Fila
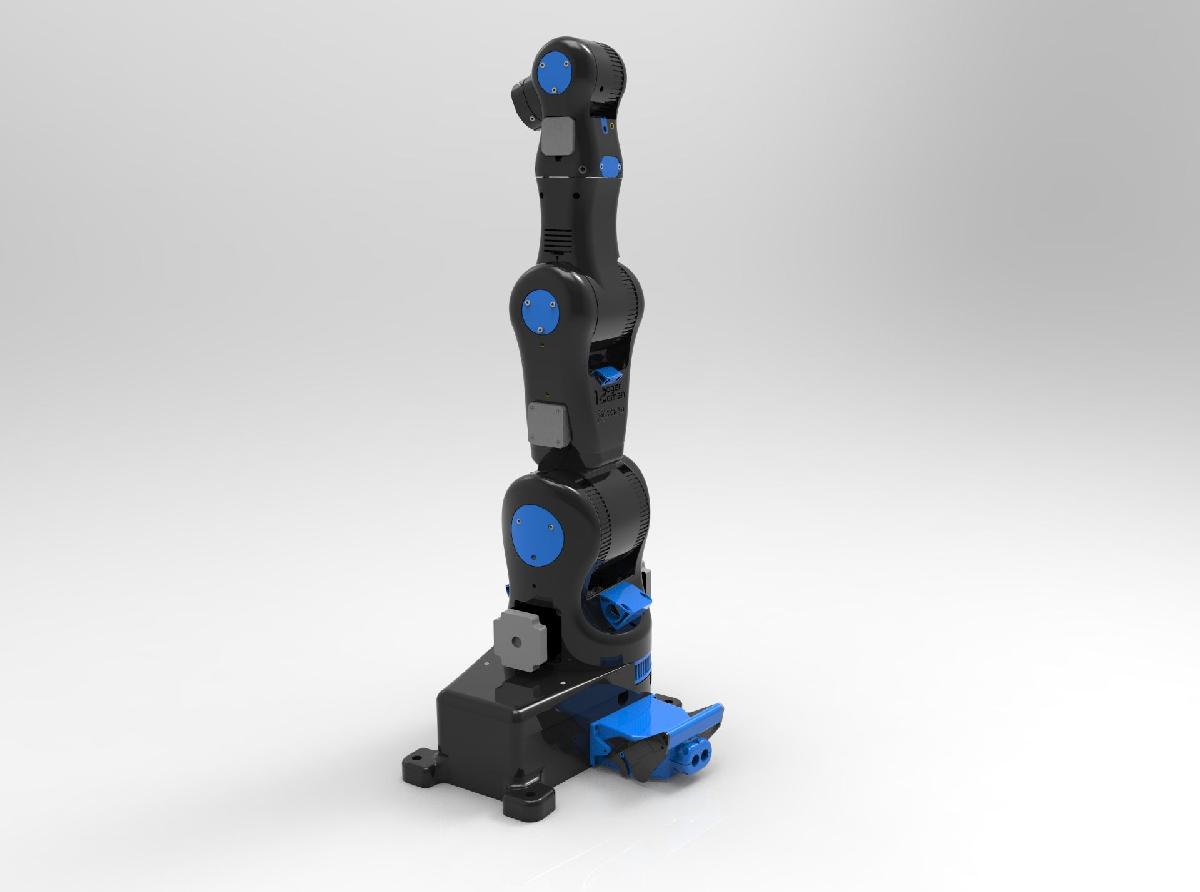
Moveo modificado 6 Axis Robot Arm (Bcn3d_Moveo)" melhorado "
Impressão 3D
Se você ainda não tem uma máquina para imprimir este arquivo pode comprar uma impressora 3d aqui!
Você pode imprimir este modelo 3d com estes filamentos ou com estas resinas 3D.
Sobre o objeto 3D Moveo modificado 6 Axis Robot Arm (Bcn3d_Moveo)" melhorado "
Este é um arquivo desenvolvido e projetado com ferramenta CAD.
Se você ainda não sabe criar seu próprio modelo 3D eu te ensino neste artigo tutorial sobre Tinkercad.
Moveo modificado 6 Axis Robot Arm (Bcn3d_Moveo)" melhorado " foi projetado para Impressora 3D. LANCAMENTO DE DADOS!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!https://mega.nz/#!Hk13WYxC!iYd4gFGYVTFJQDVSb6s2Tkos_pADstSorBYDioU513EOla! Eu modifiquei o moveo original para melhorar alguns problemas e obter um braco robotico melhor.IMPORTANTE EU NAO TESTEI TODAS AS PECAS QUE MODIFIQUEI QUALQUER FEEDBACK SERIA BOM.LEIA A ULTIMA LINHA PARA OBTER MAIS INFORMACOES DOS PROBLEMAS DE CONSTRUCAO.26/10/2017MelhoriasAcrescentei minha nova base do eixo 1 com tensionador para a correia e um tamanho maior do eixo para permitir que os cabos passem por ele.Adicionei uma conexao rapida Harting na base do eixo 1.Adicionei uma porta extra do outro lado para colocar conexoes adicionais.Adicionei um eixo 1 imprimivel em 3D (minha ideia era fazer um em aluminio com um tornos).Se voce trocar a correia por uma fechada, o robo sera capaz de rotacionar 360º.Reforco do eixo 5 (RentaPrinter disse que temos alguns problemas com essa parte).Melhorias! (antigas)- Adicionei apenas o eixo 6.- Adicionei eixo linear fixo para obter um sistema de localizacao (potenciometros) no futuro.- Adicionei um final mecanico suave.- Ponto fixo para manter o pacote de fiacao fixo (fiacao eletrica).- Melhorei o eixo 4 para um movimento mais estavel.- Tampa das correias para obter um design mais fluido.- Melhorei as tampas dos rolamentos para ter um design fluido.- Junta do eixo 1 sobredimensionada para permitir que os cabos passem por ele.- Nova base em uma peca para obter um robo mais estavel, rigido e versatil.Melhorias Futuras!!!- Fazer o eixo 1 ir alem de 360 graus.- Criar uma posicao de localizacao para cada eixo.- Criar as correias com filament flexivel inteligente. (Falha)- Ver embaixo para ver como sera o produto final.Minha ideia e ter um braco robotico conectado a um armario de energia (arduino e controlador de passo).O armario pode ter entradas e saidas para atuar no ambiente.O robo sera controlado com um Raspberry Pi com seu proprio sistema de movimento. O robo podera ser programado como junta (movido eixo por eixo) ou se mover linearmente atraves de uma estrutura base referenciada pela base do robo.Talvez eu possa colocar suportes de ferramentas.Voce podera ativar, desativar e comparar dados e I/O.Eu gostaria de fazer o mais semelhante possivel a um braco robotico industrial como Fanuc, ABB, KUKA, etc.Talvez no futuro eu faca uma prateleira ou deslize para montar o robo nela.Talvez seja interessante te mostrar como os robos industriais reais sao programados.""Informacoes extras para as modificacoesPara o eixo 4, eu apenas modifiquei o bloqueio da porca, colocando a porca bloqueada entre as 2 arruelas de nylon ou metal usinadas. Se voce observar, a arruela de nylon deve entrar no trilho e depois descer para ficar presa em um bolso de 2 mm e o mesmo para o outro lado. A medida interna da arruela de nylon deve ser ajustada perfeitamente ao eixo do motor para nao haver nenhum movimento. A porca deve se encaixar nas duas arruelas."Se voce quiser saber mais, me avise."""""PROBLEMAS DE CONSTRUCAO6EIXONo momento, o unico problema conhecido que tenho e que o motor do eixo 6 precisa ser limado (apenas os cantos), e de aluminio (material macio), nao e possivel obter mais espaco na estrutura do eixo 5.5EIXOParecem ok.4EIXOTestando.
O arquivo "Moveo modificado 6 Axis Robot Arm (Bcn3d_Moveo) - melhorado" apresenta um projeto de braço robótico em 3D que foi modificado para oferecer melhorias em relação ao modelo original. Abaixo, apresento um resumo e análise das principais características e melhorias, bem como pontos a considerar para a impressão e montagem.### Resumo do Projeto
**Modificações Principais:**
- **Base do Eixo 1:** O autor introduziu uma nova base para o eixo 1 com um tensionador para a correia e um design mais amplo para permitir a passagem dos cabos. Isso facilita a gestão dos fios e oferece um melhor suporte estrutural.
- **Conexões Rápidas:** Foram adicionadas conexões rápidas Harting, que possibilitam uma ligação mais eficiente e prática nas interconexões.
- **Eixo Imprimível em 3D:** O eixo 1 agora pode ser impresso em 3D, diferenciando-se do plano original que requereria usinagem de alumínio.
- **Eixo 6 Adicionado:** Incorporou um sexto eixo, aumentando a versatilidade do braço robótico.
- **Reforços Estruturais:** Modificações de reforço no eixo 5 e melhorias no design do eixo 4 visam assegurar um movimento mais estável e fluido.
**Futuras Melhorias Planejadas:**
- Permitir que o eixo 1 gire acima de 360 graus.
- Implementar um sistema de localização para cada eixo.
- Usar correias feitas de filamento inteligente flexível.
**Controle e Implementação:**
- O braço robótico será controlado por um Arduino e um Raspberry Pi, permitindo um sistema de movimento avançado, tanto em modo de articulação quanto linear.
### Considerações para Impressão 3D
1. **Material e Impressão:**
- Escolher um material adequado (como PLA ou PETG) para as peças do braço robótico. O autor sugere a possibilidade de usar filamentos flexíveis para algumas partes, embora isso tenha apresentado falhas anteriormente.
- Configure a impressora para garantir que as partes sejam impressas com a tolerância necessária, especialmente nas peças que interagem entre si (como as juntas e eixos).
2. **Testes e Feedback:**
- O autor menciona que algumas partes não foram testadas. Portanto, é essencial realizar testes após a impressão para ajustar qualquer desvio ou problema que possa surgir.
- Feedback de outros usuários pode ser valioso e contribuir para melhorias futuras, então a colaboração na comunidade é incentivada.
3. **Montagem:**
- Siga cuidadosamente as instruções de montagem, especialmente na parte de bloqueio de porcas e arruelas para assegurar que as peças se encaixem bem e funcionem conforme esperado.
4. **Problemas de construção conhecidos:**
- De acordo com as informações fornecidas, o motor do eixo 6 pode necessitar de alguns ajustes (lixamento das bordas). É importante verificar e solucionar esses problemas antes de considerar a montagem final.
### Conclusão
O "Moveo modificado 6 Axis Robot Arm" apresenta uma proposta interessante de um braço robótico acessível, com a possibilidade de personalizações e melhorias contínuas. Seus objetivos, que incluem a criação de um braço robótico similar aos modelos industriais, mostram um alinhamento com tendências de automação e robótica. As melhorias e ajustes indicam um compromisso com a evolução do design, tornando o projeto bastante dinâmico e aberto à contribuição da comunidade.
Não deixe de imprimir e compartilhar este modelo 3d. Não deixe sua impressora 3D parada. Mas se você não tem uma impressora 3D ainda, escolha a sua agora.