
Imprimir STL Mao do robo: imprimir no lugar & tightenable Modelo 3D - 6290274
Things 3D Fila
Mao do robo: imprimir no lugar & tightenable
Robótica
Se você ainda não tem uma máquina para imprimir este arquivo pode comprar uma impressora 3d aqui!
Você pode imprimir este modelo 3d com estes filamentos ou com estas resinas 3D.
Sobre o objeto 3D Mao do robo: imprimir no lugar & tightenable
Este é um arquivo desenvolvido e projetado com ferramenta CAD.
Se você ainda não sabe criar seu próprio modelo 3D eu te ensino neste artigo tutorial sobre Tinkercad.
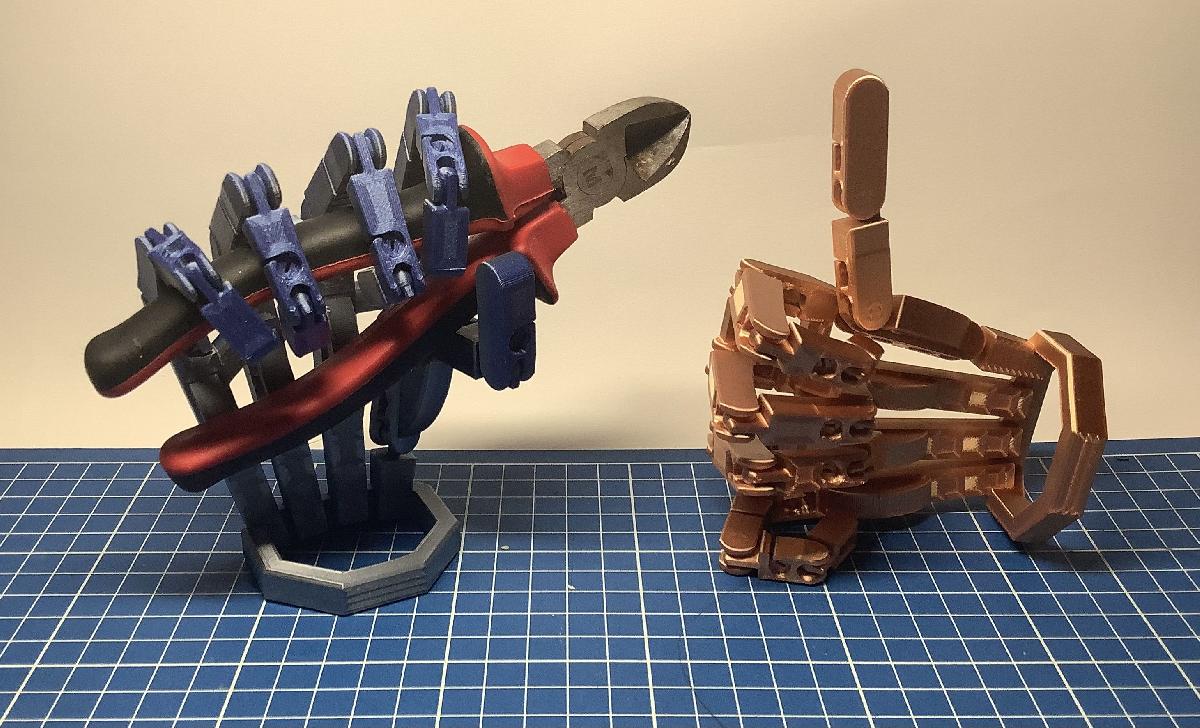
Mao do robo: imprimir no lugar & tightenable foi projetado para Impressora 3D. Uma mao de robo: imprima no lugar, mas posavel atraves dos parafusos de aperto embutidos. Corte com camada padrao Cura PLA 3D Fila 0,2 mm / noozle 0,4 mm. Sem brim, sem suporte (ha suportes embutidos onde necessario). Cabe em uma pequena impressora como o meu Genio da Artilharia. Primeiro tente imprimir o teste de junta double-09 (25 min). Remova o suporte embutido abaixo da juncao. Verifique se o parafuso pode ser desparafusado para desprendi-lo, em seguida, rosqueie-o, com uma pequena chave de fenda. Se tudo estiver preso, tente reduzir a extrusao de fluxo em sua impressora (eu tenho que definir o fluxo entre 95% e 90% na minha impressora, dependendo do filamento). Em seguida, imprima a mao (principal-7.2, 9h00). Deve imprimir e sair da cama sem problemas. Ha um par de suportes embutidos para remover nas articulacoes do polegar (facilmente). Desparafuse para destravar e, em seguida, parafuse para apertar as juntas como quiser. Certifique-se de empurrar a chave de fenda profundamente na fenda do parafuso para arrasta-la corretamente pela primeira vez. Tive que fazer a fenda bem fina para deixar o parafuso mais robusto. Tenha cuidado, nao se machuque! Apos essas primeiras curvas, a fenda se alargara um pouco e sera facil engatar a chave de fenda. Se tiver alguma duvida, me avise nos comentarios. Ficarei grata se voce curtir e postar suas makes. Eu adoraria ler seus comentarios ou ver como suas makes se parecem! [editar] Uau! Vejo tantos dowloads desse projeto! Alguns de voces certamente ja tentaram imprimi-lo? POR FAVOR, POR FAVOR me diga como ele imprimiu para voce? Tomei muito cuidado para tornar a impressao confiavel e o objeto robusto, mas sera que e mesmo o caso? De-me um feedback! Obrigado. [editar] Parece que alguns de voces tem problemas para baixar do thingiverse. Entao eu coloquei os arquivos em printables tambem: https://www.printables.com/fr/model/640043-robot-hand-print-in-place-tightenable/files Eu tambem carreguei uma copia do arquivo principal, 7.2bis.stl. Voce pode tentar este segundo arquivo. E o mesmo, exceto que eu reparei alguns erros encontrados pelo win3d. Eles nao impedem o Cura de fatiar, mas o que quer que seja. [editar] Muitos de voces postaram um make, muito obrigado a eles! Vejo que os parafusos poderiam ser retrabalhados um pouco para as pessoas que tem alguma dificuldade em imprimi-los. Pretendo retrabalhar o arquivo, mas atualmente minha impressora esta morta. Pretendo comprar um bambulab p1s e vou reiniciar entao. BTW, se algum de voces quiser me comprar um para apoiar o meu trabalho, voce e muito bem-vindo, apenas me envie, obrigado. 😁
O arquivo "Mão do Robô: Imprimir no Lugar & Apertável" refere-se a um modelo 3D de uma mão de robô que pode ser impresso diretamente de uma impressora 3D. Foi projetado para ser impresso no local, mas também pode ser ajustado por meio de parafusos de aperto embutidos. O autor do arquivo sugere usar um corte de camada padrão Cura PLA de 0,2 mm / nozzle de 0,4 mm para impressão.Primeiro, o autor recomenda imprimir o teste de junta double-09 e remover o suporte embutido abaixo da junção. Ele sugere que se verifique se o parafuso pode ser desparafusado para desprendê-lo, em seguida, rosqueá-lo com uma pequena chave de fenda. Se tudo estiver preso, ele sugere que se reduza a extrusão de fluxo na impressora, com ajustes de fluxo entre 95% e 90% dependendo do filamento usado.
Em seguida, o autor diz para imprimir a mão principal-7.2 que deve imprimir e sair da cama sem problemas. Existem suportes embutidos para remover nas articulações do polegar, que são fáceis de remover. O usuário pode desparafusar para destravar e parafusar para apertar as juntas como quiser.
O autor solicita que os usuários compartilhem suas impressões e ofereçam feedback sobre o projeto, pois ele afirma ter se esforçado muito para tornar a impressão confiável e o objeto robusto. Para aqueles que tiverem problemas para baixar o arquivo do thingiverse, o autor fornece uma cópia no site printables. Finalmente, o autor expressa a intenção de calibrar os parafusos para aqueles que têm dificuldade em imprimi-los, uma vez que adquira uma nova impressora, já que a atual não está mais funcional.
Não deixe de imprimir e compartilhar este modelo 3d. Não deixe sua impressora 3D parada. Mas se você não tem uma impressora 3D ainda, escolha a sua agora.