
Imprimir STL JLO DYOR101X REMIX Modelo 3D - 2411927
Things 3D Fila
JLO DYOR101X REMIX
Robótica
Se você ainda não tem uma máquina para imprimir este arquivo pode comprar uma impressora 3d aqui!
Você pode imprimir este modelo 3d com estes filamentos ou com estas resinas 3D.
Sobre o objeto 3D JLO DYOR101X REMIX
Este é um arquivo desenvolvido e projetado com ferramenta CAD.
Se você ainda não sabe criar seu próprio modelo 3D eu te ensino neste artigo tutorial sobre Tinkercad.
JLO DYOR101X REMIX foi projetado para Impressora 3D. JLO- DYOR.Neste caso, quisemos aproveitar que vamos imprimir em 3D o robo para dar um ar mais personalizado, e para que o seguelinhas seja mais real, nos escaneamos em 3D e incorporamos ao modelo. Alem disso, inserimos um video animado no Blenderpara mostrar o modelo completo.Incorporariamos ao exercicio a tarefa de escanear-se entre colegas, retocar-se digitalmente com algum programa como o Blender, e proceder a incorporacao desse detalhe personalizado ao modelo. Acreditamos que assim aproveitamos o potencial de personalizacao que a impressao 3D possui.Tambem seria possivel optar por uma tecnica mista na qual a base fosse feita por corte ou com molde e, posteriormente, se adicionasse o busto do aluno que o tornaria mais "seu".A tela vai sobre o personagem seguelinhas e abaixo dele estao o zumbador e o ultrassom.https://youtu.be/A705AoMgvSQFASE 1: DESIGN 3D E FABRICACAO DE CARCACA.0.- Em relacao ao desenvolvimento do projeto junto ao que foi visto sobre o desenvolvimento do modelo no Tinkercad para revisar os conceitos aprendidos no curso. Duplicamos o modelo para deixar apenas as duas pecas a serem impressas, com os espacos para os componentes. Alem disso, quisemos personaliza-lo marcando os textos na base.1.- Usamos o Blenderpara revisar o modelo escaneado (segundo este video https://youtu.be/bo0F7AQXc-I).2.- Revisamos e inspecionamos o modelo, assim como detectamos os possiveis pontos de voladizo com o Meshmixer. (Se nao dispuser de scanner 3D, tambem temos um tutorial sobre como escanear objetos por levantamento fotogrametrico a partir de um video: https://youtu.be/Zh7HO1q9tQI).3.- Laminamos o .stl para obter o .gcode.4.- Procedemos a impressao 3D. Assumimos o risco de imprimir certos voladizos que a impressora resolveu corretamente.Apos todo esse processo, temos o suporte fisico para nosso robo e seus componentes eletronicos.FASE 2. ELETRONICANesta fase, primeiro foi projetado o circuito atraves do Fritzing para ter um esquema claro e realizar os testes, e entao foi realizado o montagem conforme as pecas foram chegando.FASE 3. PROGRAMACAO E APP MOVEL.Nesta fase, procedemos a programacao de cada um dos comandos com o FACILINO, embora para quem nao tenha licenca e trabalhe com a demo, tambem se possa subir atraves do programa Arduino IDE.Na segunda parte, e gracas ao dispositivo Bluetooth, conectamos nosso robo com o aplicativo desenvolvido, onde personalizamos a interface e programamos esse aplicativo para que envie os comandos ao robo de maneira sem fio.FUNCOES DO ROBO.Este robo e capaz de detectar obstaculos e distancias gracas ao sonar, emitir sons e ate vozes gracas ao zumbador, deslocar-se gracas aos seus dois servos 360 e sua roda livre, conectar-se a um dispositivo Bluetooth e ser controlado, por exemplo, a partir de um celular (com seu acelerometro), agarrar coisas com seus bracos-servo de posicao e seguir linhas gracas ao modulo seguelinhas.Curso MOOC EdX: https://www.edx.org/course/disena-fabrica-y-programa-tu-propio-upvalenciax-dyor101xPortal de formacao robo DYOR: http://dyor.roboticafacil.esBlog robotica da UPV: http://robotica.webs.upv.esTwitter (@roboticaUPV): https://twitter.com/roboticaUPVFacebook (robotica UPV): https://www.facebook.com/roboticaUPV
O arquivo "JLO-DYOR101X REMIX" apresenta um projeto inovador que combina impressão 3D com personalização e funcionalidades robóticas. A seguir, farei uma análise detalhada de cada fase do desenvolvimento, destacando os principais aspectos do processo e as características do robô.### 1. Personalização do Modelo
O projeto se destaca pela personalização do robô, utilizando escaneamento 3D para integrar o modelo digital do aluno ao design do robô. Essa abordagem não só torna o produto final mais individualizado, mas também incentiva a criatividade e o envolvimento dos participantes. A introdução de um vídeo no Blender para representar o modelo completo é uma ótima maneira de mostrar o design de forma dinâmica e atrativa.
### 2. Fase 1: Design 3D e Fabricação da Carcaça
- **Desenvolvimento e Revisão do Modelo**: O uso do Tinkercad para a criação inicial e o Blender para a revisão de detalhes é um exemplo de boa prática. A duplicação do modelo para adaptar apenas duas peças para impressão também mostra uma abordagem prática e funcional.
- **Revisão e Inspeção**: A verificação de possíveis pontos de voladizo utilizando o Meshmixer é uma etapa essencial que garante a viabilidade da impressão 3D, permitindo a identificação e correção de problemas antes da impressão.
- **Impressão 3D**: Ao laminar o arquivo .stl para gerar o .gcode, o projeto se dirige para a etapa final do design. A coragem de imprimir voladizos, que podem apresentar dificuldades, é um sinal da confiança nas capacidades da impressora.
### 3. Fase 2: Eletrônica
Nesta fase, o projeto se concentra na montagem do circuito. O uso do Fritzing para criar um esquema claro é uma boa escolha, pois facilita a compreensão e a execução da montagem dos componentes eletrônicos. Essa etapa é crucial para garantir que todas as partes do robô funcionem harmoniosamente.
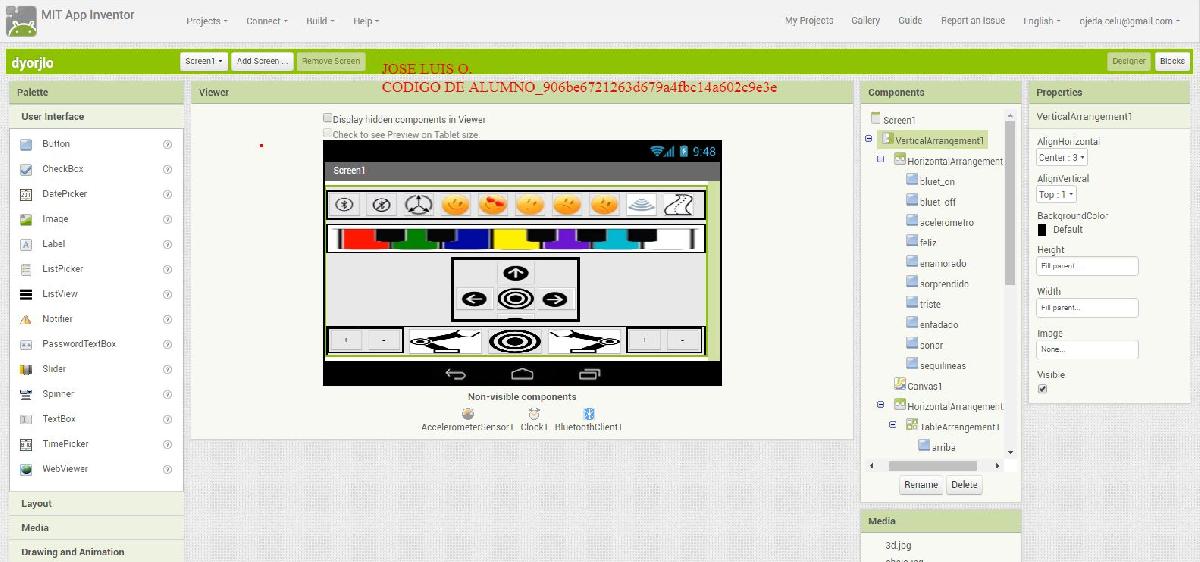
### 4. Fase 3: Programação e App Móvel
A programação dos comandos com o FACILINO, além da possibilidade de uso do Arduino IDE, permite uma abordagem acessível a um público mais amplo, mesmo aqueles sem licença completa do software. A integração do Bluetooth para comunicação sem fio entre o robô e o app desenvolvido é uma maneira moderna de controlar um robô, permitindo personalização da interface e dos comandos.
### 5. Funcionalidades do Robô
As características técnicas do robô incluem:
- **Detecção de Obstáculos**: Habilidades de sonar para evitar colisões, que são essenciais para um robô autônomo.
- **Emissão de Sons**: Uso de um zumbador para interação sonora, o que pode tornar o robô mais divertido e envolvente.
- **Movimentação**: A utilização de dois servos de 360 graus para locomoção, juntamente com uma roda livre, garante boa agilidade e liberdade de movimento.
- **Controle via Bluetooth**: A capacidade de ser controlado por um celular, utilizando o acelerômetro, oferece uma forma intuitiva de interação.
- **Manipulação e Seguição de Linhas**: A opção de agarrar objetos e seguir linhas é uma aplicação útil em diversas tarefas robóticas.
### Conclusão
Através do projeto "JLO-DYOR101X REMIX", os alunos não apenas aplicam conhecimentos de design 3D e eletrônica, mas também têm a oportunidade de criar um robô que reflete suas identidades e personalidades. O uso da tecnologia de impressão 3D, junto com a personalização digital e a programação, proporciona um aprendizado prático e inovador, alinhado com as tendências atuais da robótica e da educação técnica. Este projeto é um excelente exemplo de como a integração de diversas áreas de conhecimento pode resultar em um produto final fascinante e funcional.
Não deixe de imprimir e compartilhar este modelo 3d. Não deixe sua impressora 3D parada. Mas se você não tem uma impressora 3D ainda, escolha a sua agora.