
Imprimir STL GOPROBOT V1.0 Modelo 3D - 1549669
Things 3D Fila
GOPROBOT V1.0
Robótica
Se você ainda não tem uma máquina para imprimir este arquivo pode comprar uma impressora 3d aqui!
Você pode imprimir este modelo 3d com estes filamentos ou com estas resinas 3D.
Sobre o objeto 3D GOPROBOT V1.0
Este é um arquivo desenvolvido e projetado com ferramenta CAD.
Se você ainda não sabe criar seu próprio modelo 3D eu te ensino neste artigo tutorial sobre Tinkercad.
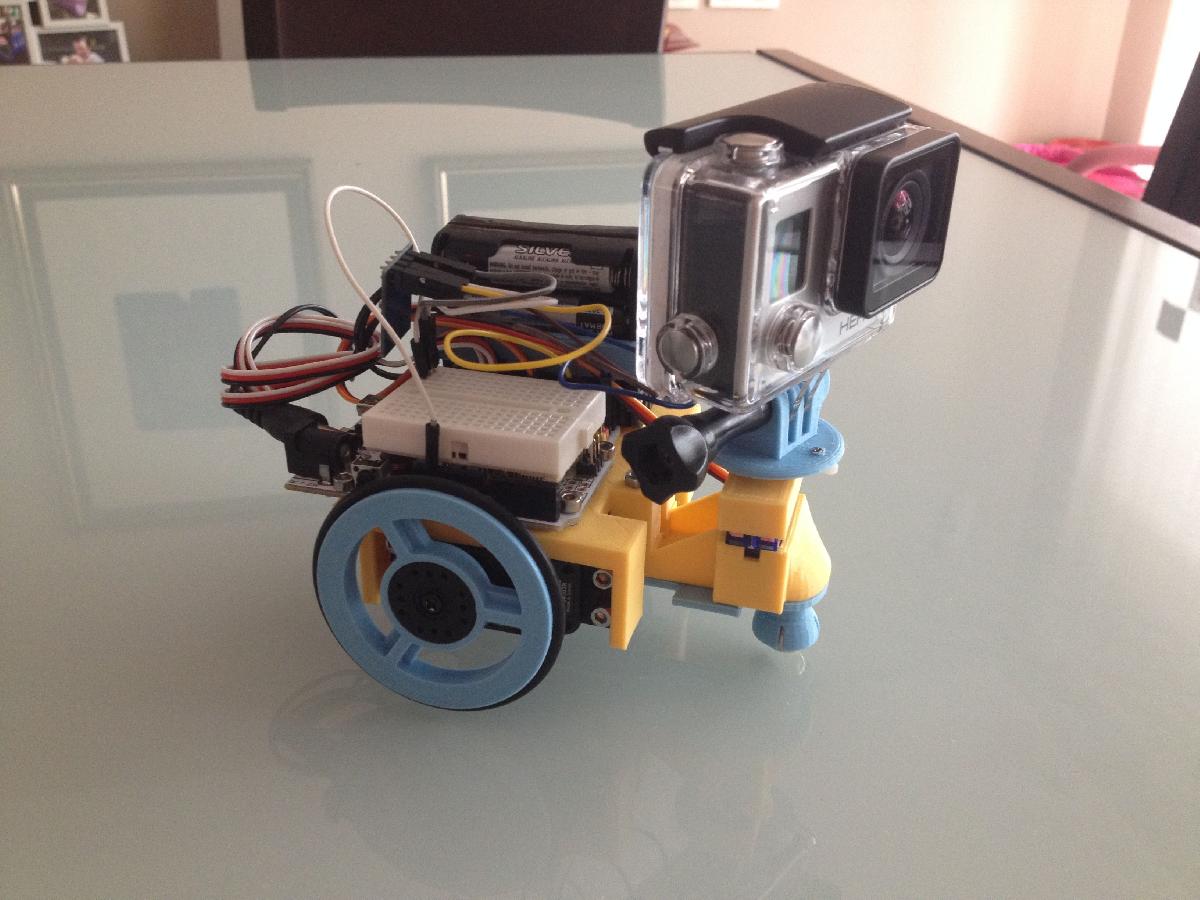
GOPROBOT V1.0 foi projetado para Impressora 3D. ANTECEDENTESA historia deste pequeno Printbot, do qual estamos muito orgulhosos, comeca ha alguns meses, quando meu filho Javier, de 8 anos, recebeu como presente de Reis um kit de Robotica (da bq, recomendo) e comecamos a mexer com coisas de eletronica basica, arduino e demais. E tendo uma impressora 3D e depois de montar alguns printbots, dissemos, por que nao tentamos fazer um nos mesmos do zero? E se desenhassemos um e vissemos se somos capazes?Devo dizer que nossos conhecimentos de eletronica, programacao e automatismos eram "0", e salvo o tema do design e modelagem 3D, do qual algo controlo, tudo o mais estava por fazer.AGRADECIMENTOSAntes de continuar contando isso, devo agradecer ao pessoal da bq, a sua plataforma DIWO, aos seus cursos de robotica e a sua plataforma de programacao por caixas de Arduino bitbloq.Especialmente quero agradecer a Juan Carlos, da PROMETEC (http://www.prometec.net) pelo seu excelente curso aberto de Arduino, sem o qual teria sido impossivel realizar esta tarefa.Tambem devo agradecer a Javier Vidal Peña (https://Twitter.com/javidalpe) que, com paciencia, nos ajudou a fazer o site de controle e a depurar nosso codigo do programa.O CONCEITOA ideia era fazer um robo por controle remoto, com camera integrada, para poder ser manobrado a distancia e sem ter visao direta dele. Dos possiveis sistemas de controle remoto, o WIFI nos pareceu o mais adequado, ja que pensavamos que nos permitiria uma maior autonomia, cobertura e possibilidade de transmissao de video em tempo real, ao menos em uma area controlada, e com a possibilidade de chegar a controla-lo remotamente pela internet (esta parte ainda esta por conseguir).Dado que tinhamos uma Gopro, que se conecta em streaming com seu proprio aplicativo com o telefone celular, pensamos que parte do trabalho ja estava solucionado, e tudo o que faltava era resolver o controle do movimento do robo.Um importante obstaculo que se apresentou nos primeiros testes foi descobrir que o streaming da camera tem um atraso de alguns segundos. Este pequeno inconveniente, no entanto, para nos tinha algo positivo, ou simpatico, ja que fazia com que o controle do robo se parecesse a manejar um robo em Marte!!!!!! Com certeza sera algo com solucao, mas em nosso caso, e quase mais um ponto a favor do que uma desvantagem.Dito isso, por tudo o mais, trata-se de um rover com dois servos de rotacao continua, montados em um chassi sobre o qual se situa a eletronica e uma montura para a camera, com um micro servo que permite a rotacao de 180º.AS PECAS IMPRESSASPara o design das pecas nos servimos de nossa experiencia anterior montando os printbots da bq (beaetle e renacuajo) e alguns mais que vimos aqui no thingiverse. Partimos de algumas pecas deles, as quais copiamos e/ou modificamos para chegar a nossa solucao. A ideia foi construir um chassi solido, simples e compacto. Para seu design usamos autocad e sketchup.Tivemos alguns pequenos problemas de colisoes e por isso voces verao que o robo esta impresso em duas cores, pois foi necessario retocar algumas pecas do primeiro prototipo por problemas de encaixe. Isso com um solidworks ou um inventor nao acontece!As que subimos na sua versao atual sao as do prototipo que voces veem impresso. Estamos trabalhando para melhorar algumas coisas, como uma montura para o wifi.COMPONENTES PRINCIPAISPlaca controladora Freaduino UNO (compativel com arduino UNO ou similar. Esta tem a vantagem de incorporar na propria placa os conectores SVG em cada PIN)2 Servos de Rotacao Continua SM-S4303R ou similaresUm micro servo de 9g (e seus parafusos)Modulo WIFI ESP8266 (conector FTDI para programa-lo se necessario)Uma Camera Gopro Hero 3, com sua montagem (ou similar com WIFI)Parafusos e porcas M3 (diferentes medidas, 12, 14, 30 mm, etc)Uma bola ou bolinha ou rolamento de 12 mm de diametro2 juntas toricas de 50 mmUm porta-baterias 8 x AAAUma miniprotoboardAlguns cabos de protoboardFUNCOES PRINCIPAIS E CONTROLEAvancar, retroceder, giro a esquerda, a direita e parada.Movimento da camera para a direita, para a esquerda e posicao central.Com o site de controle, controla-se mediante pulsos nas setas.E necessario executar atraves de comandos AT no monitor serie do Arduino o seguinte:AT+CIFSR? // Isso nos dara a URL do nosso ESP8266AT+CWLAP="tured","tucontraseña" //Isso somente uma vez, pois fica armazenado.No site de controle ha um quadro a preencher com a URL do seu printbot (a que voce obteve ao executar o comando AT+CIFSR?Recomendo dar uma olhada nos tutoriais do ESP 8266 em www.prometec.net, onde se explica muito bem como configurar o ESP8266 e suas peculiaridades.http://www.prometec.net/arduino-wifi/Anexei o programa de controle, ainda em fase de depuracao e melhoria. Sugestoes e contribuicoes sao bem-vindas (esta e a nossa parte mais fraca) ;) E como eu digo, coloquei uma versao Beta, funcionando parcialmente. Espero em alguns dias te-la completa, correta e mais depurada. Coloco assim, na esperanca de que alguem que saiba mais nos ajude!O arquivo controlweb.html e executado no navegador para o controle do printbot (manter pressionada a seta de movimento e soltar para parar).Para terminar, um par de videos da fase de testes (em loop e sem controle WIFI). Em breve colocaremos videos da operacao remota:https://www.youtube.com/watch?v=HMv9-_M3Ngghttps://www.youtube.com/watch?v=LGqeGaWIHyk
O modelo 3D "GOPROBOT V1.0" é uma criação inspiradora que surgiu da experiência prática e da curiosidade de um pai e seu filho. Este projeto reflete o aprendizado em eletrônica, programação e design 3D, resultando em um robô remoto com controle por Wi-Fi e câmera integrada. A seguir, apresento um resumo detalhado do modelo:### Antecedentes
A ideia do GOPROBOT começou quando o filho do autor, Javier, recebeu um kit de robótica como presente. Juntos, eles decidiram criar um robô do zero, desafiando suas habilidades em eletrônica e programação, áreas nas quais tinham conhecimento limitado. A experiência prévia com impressoras 3D e design facilitou a modelagem das peças necessárias.
### Agradecimentos
O autor expressa gratidão a várias fontes que contribuíram para o desenvolvimento do projeto. Isso inclui a bq e a plataforma DIWO, que proporcionaram cursos e recursos valiosos, além de apoio de especialistas como Juan Carlos da PROMETEC, que ajudaram na formação em Arduino e programação.
### O Conceito
O objetivo principal do GOPROBOT é ser um rover remoto que opere com uma câmera Gopro, permitindo a visualização em tempo real enquanto navega em diversas áreas. O controle da movimentação é feito via Wi-Fi, o que oferece uma boa autonomia. Apesar do atraso no streaming da câmera, que adiciona uma camada de desafio semelhante a controlar um robô em Marte, essa característca foi considerada uma experiência interessante pelos criadores.
### Peças Impressas
O design das peças foi baseado em experiências anteriores com modelos de robôs, utilizando softwares como AutoCAD e SketchUp. Algumas peças foram adaptadas de projetos existentes no Thingiverse, resultando em um chassi robusto e compacto para o robô. O autor enfrentou desafios de encaixe que obrigaram a imprimir as peças em diferentes cores.
### Componentes Principais
O GOPROBOT conta com uma configuração interessante, incluindo:
- **Placa Controladora**: Freduino UNO, compatível com Arduino.
- **Servos**: Dois servos de rotação contínua (SM-S4303R) e um micro servo para controle da câmera.
- **Módulo Wi-Fi**: ESP8266, para controle remoto via internet.
- **Câmera**: Gopro Hero 3, que transmite vídeo em tempo real.
- Outras peças como parafusos, juntas, porte-baterias, e protoboard.
### Funções Principais e Controle
As operações principais incluem mover para frente, retroceder, girar e controlar a posição da câmera. O controle é feito através de um site que se conecta ao robô, e é necessário programar o módulo Wi-Fi com comandos AT para estabelecê-lo.
### Conclusão
O GOPROBOT V1.0 é um projeto valioso que vai além de simples aprendizado. Ele representa a fusão de habilidades em design, eletrônica e programação, proporcionando uma experiência prática e educativa para pai e filho. Com planos para melhorias e contribuições da comunidade, o projeto pode crescer e se aprimorar ainda mais, incentivando outros a explorar o mundo da robótica e da impressão 3D.
Não deixe de imprimir e compartilhar este modelo 3d. Não deixe sua impressora 3D parada. Mas se você não tem uma impressora 3D ainda, escolha a sua agora.