
Imprimir STL Extrusora Dupla Avancada cabecote retratil Modelo 3D - 1218361
Things 3D Fila
Extrusora Dupla Avancada cabecote retratil
Extrusoras para impressoras 3D
Se você ainda não tem uma máquina para imprimir este arquivo pode comprar uma impressora 3d aqui!
Você pode imprimir este modelo 3d com estes filamentos ou com estas resinas 3D.
Sobre o objeto 3D Extrusora Dupla Avancada cabecote retratil
Este é um arquivo desenvolvido e projetado com ferramenta CAD.
Se você ainda não sabe criar seu próprio modelo 3D eu te ensino neste artigo tutorial sobre Tinkercad.
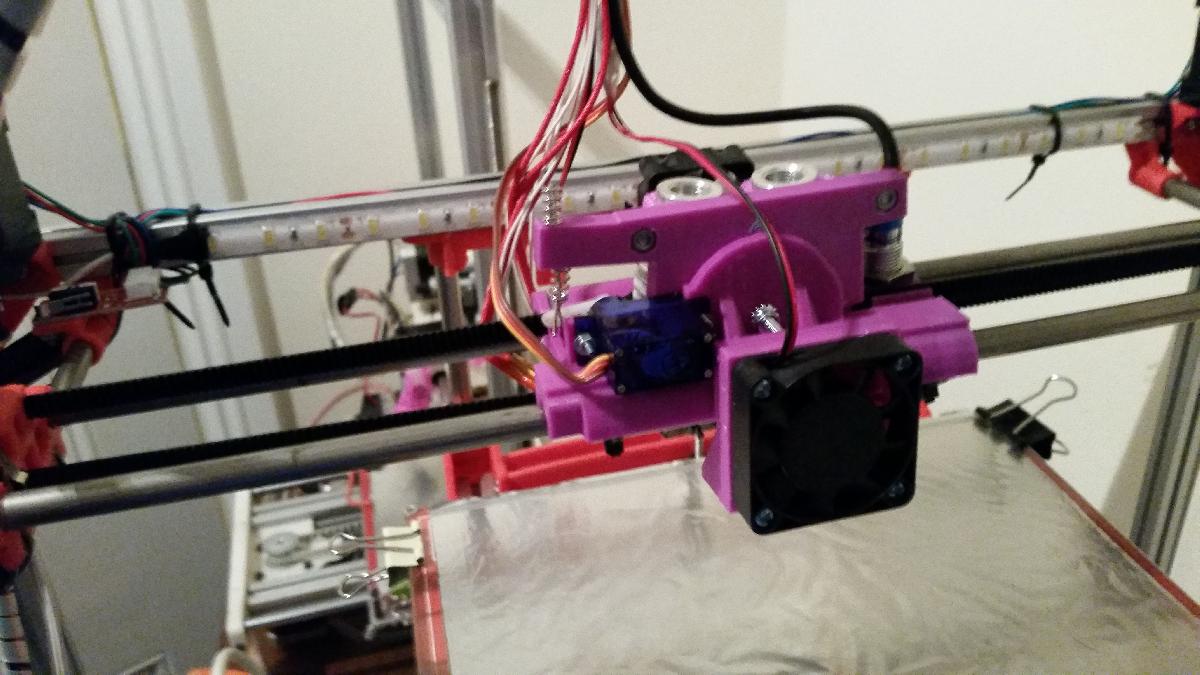
Extrusora Dupla Avancada cabecote retratil foi projetado para Impressora 3D. Esta e uma tentativa de melhorar a impressao com extrusora dupla.Eu adicionei um servo para mover a extrusora em 10 graus. Isso permite que a extrusora nao utilizada seja levantada de 1 a 2 mm da cama.Eu usei isso na minha impressora CoreXY http://www.thingiverse.com/thing:1183198Eu uso um pequeno servo MG90S para mover as extrusoras.Funciona com codigo Marlin na RAMPS 1.4 (testando na versao 1.0 antiga e na mais recente 1.1.0-RC3)o servo esta conectado na porta 11 (porta padrao do servo 0)O comando M280 Px Sy moveria o servo normalmente, mas e quase impossivel fazer com que o slicer mude a ferramenta automaticamente (eu uso Slic3r ou Simplify3D). Portanto, eu adicionei um G-code Personalizado M801 para fazer isso.O comando move o servo para a posicao P ou S (em mS) com base no valor T (0 ou 1). Assim, T0 = usa o valor P e T1 = usa o valor S.Exemplos:M801 P50 S100 T0 (isso move para mS 50)M801 P50 S100 T1 (isso move para mS 100)<Exemplo de configuracao do Slic3r. Na configuracao da impressora, adicione G-Code Personalizado para a mudanca de ferramenta>M801 P50 S100 T[next_extruder]Semelhante no Simplify3D, (troque next_extruder por new_tool)M801 P50 S100 T[new_tool]Para Marlin 1.1 e versoes acimaMarlin_main.cppM801 - PERSONALIZADO: move o servo para a posicao S ou P (em mS) com base em T T0= usa o valor P T1 = usa o valor S exemplo M801 P50 S100 T0. isso me permite mudar a posicao da extrusora na mudanca de ferramenta no controle deslizante normal// ---------------------------------------------------------------------------------------------------------------------------------------------// Codigo M801 Personalizado da Alisi comeca aqui // M801 - Codigo Personalizado - define a posicao do servo com base em T (0 ou 1) P = T0 e P absoluto. S = T1 sempre Servo 0, S: angulo ou microssegundosinline void gcode_M801() { int servo_index = 0; int servo_position[2] = {0,0} ; int servo_position_tool = -1; // ira armazenar o valor T 0 ou 1 servo_position[0] = code_seen('P') ? code_value_short() : -1; servo_position[1] = code_seen('S') ? code_value_short() : -1; servo_position_tool = code_seen('T') ? code_value_short() : -1; if (servo_position_tool >= 0) { servo[servo_index].move(servo_position[servo_position_tool]); } else { SERIAL_ECHO_START; SERIAL_ECHO("Servo "); SERIAL_ECHO(servo_position_tool); SERIAL_ECHOLN(" fora do intervalo"); } }// ---------------------------------------------------------------------------------------------------------------------------------------------configuration.h/*****\Suporte a SERVO R/CPatrocinado pela TrinityLabs, Reformulado por codexmas**/// Numero de servos//// Se voce selecionar uma configuracao abaixo, isso recebera um valor padrao e nao precisa ser configurado manualmente// configure manualmente se voce tiver mais servos do que extrusoras e desejar controlar alguns manualmente// deixa-lo indefinido ou definir como 0 desativara o subsistema servo// Se nao tiver certeza, deixe comentado / desativado//-#define NUM_SERVOS 1 // O indice do servo comeca em 0 para o comando M280// Fim de curso do Servo//// Isso permite paradas de fim acionadas por servo, o uso principal e para o eixo Z para eliminar a calibracao ou mudancas de altura da cama.// Use M851 para definir o deslocamento vertical da sonda Z a partir do bico. Armazene essa configuracao com M500.////#define X_ENDSTOP_SERVO_NR 1//#define Y_ENDSTOP_SERVO_NR 2-#define Z_ENDSTOP_SERVO_NR 0 //<<<<<<<<<<<< A Lisi Dez 2015-#define SERVO_ENDSTOP_ANGLES {{0,0}, {0,0}, {65,60}} // Eixos X,Y,Z angulos de extensao e retracao //<<<<<<<<<<<< A Lisi Dez 2015// Desativacao do servo//// Com essa opcao, os servos sao alimentados apenas durante o movimento, em seguida, desligados para evitar tremores.-#define DEACTIVATE_SERVOS_AFTER_MOVE //<<<<<<<<<<<< A Lisi Dez 2015-#if ENABLED(DEACTIVATE_SERVOS_AFTER_MOVE)// Atraso (em microssegundos) antes de desligar o servo. Isso depende da velocidade do servo.// 300ms e um bom valor, mas voce pode tentar um atraso menor.// Se o servo nao conseguir alcancar a posicao solicitada, aumente-o.-#define SERVO_DEACTIVATION_DELAY 400 //<<<<<<<<<<<< A Lisi Dez 2015-#endif
O arquivo "Extrusora Dupla Avancada - cabecote retrátil" é uma proposta inovadora para aprimorar a impressão 3D utilizando extrusores duplos. A ideia central é integrar um servo motor, especificamente o modelo MG90S, que permite o movimento do extrusor em 10 graus. Essa movimentação é fundamental para a impressão, uma vez que eleva o extrusor não utilizado entre 1 a 2 mm acima da cama de impressão. Isso ajuda a evitar que o bico do extrusor que não está em uso interfira na impressão da peça, melhorando assim a qualidade final do trabalho.O sistema foi testado em uma impressora 3D do tipo CoreXY, e o autor disponibilizou um link para a criação no Thingiverse, permitindo que outros usuários possam reproduzir ou adaptar a ideia em suas próprias impressoras. A configuração foi desenvolvida para funcionar com o firmware Marlin na versão RAMPS 1.4, sendo compatível com várias versões do Marlin, incluindo as versões mais antigas e recentes.
Um aspecto interessante deste modelo é a customização do código G para o controle do servo. O comando `M280 Px Sy` é utilizado para movimentar o servo normalmente, mas a automação da troca de ferramentas nos slicers é uma tarefa mais desafiadora. Por conta disso, um código G personalizado, `M801`, foi criado para facilitar essa automação. Esse comando move o servo para posições especificadas em milissegundos dependendo do extrusor ativo (T0 ou T1).
Os exemplos de uso do `M801` tornam evidente como é possível programar a movimentação do servo para as diferentes posições do extrusor com base na ferramenta que está sendo utilizada na impressão. O autor também fornece detalhes sobre como implementar esse comando em softwares como Slic3r e Simplify3D, oferecendo uma integração prática com o fluxo de trabalho de impressão 3D.
Por fim, é importante notar que o desenvolvimento deste modelo não só visa a melhoria das impressões, mas também promove o compartilhamento de conhecimento dentro da comunidade de impressão 3D, já que o código, as configurações e experiências estão abertamente disponíveis para que outros possam aprender e melhorar suas próprias impressoras.
Não deixe de imprimir e compartilhar este modelo 3d. Não deixe sua impressora 3D parada. Mas se você não tem uma impressora 3D ainda, escolha a sua agora.