
Imprimir STL Bodgie o Pequeno Quadricoptero Modelo 3D - 10067
Things 3D Fila
Bodgie o Pequeno Quadricoptero
Outro
Se você ainda não tem uma máquina para imprimir este arquivo pode comprar uma impressora 3d aqui!
Você pode imprimir este modelo 3d com estes filamentos ou com estas resinas 3D.
Sobre o objeto 3D Bodgie o Pequeno Quadricoptero
Este é um arquivo desenvolvido e projetado com ferramenta CAD.
Se você ainda não sabe criar seu próprio modelo 3D eu te ensino neste artigo tutorial sobre Tinkercad.
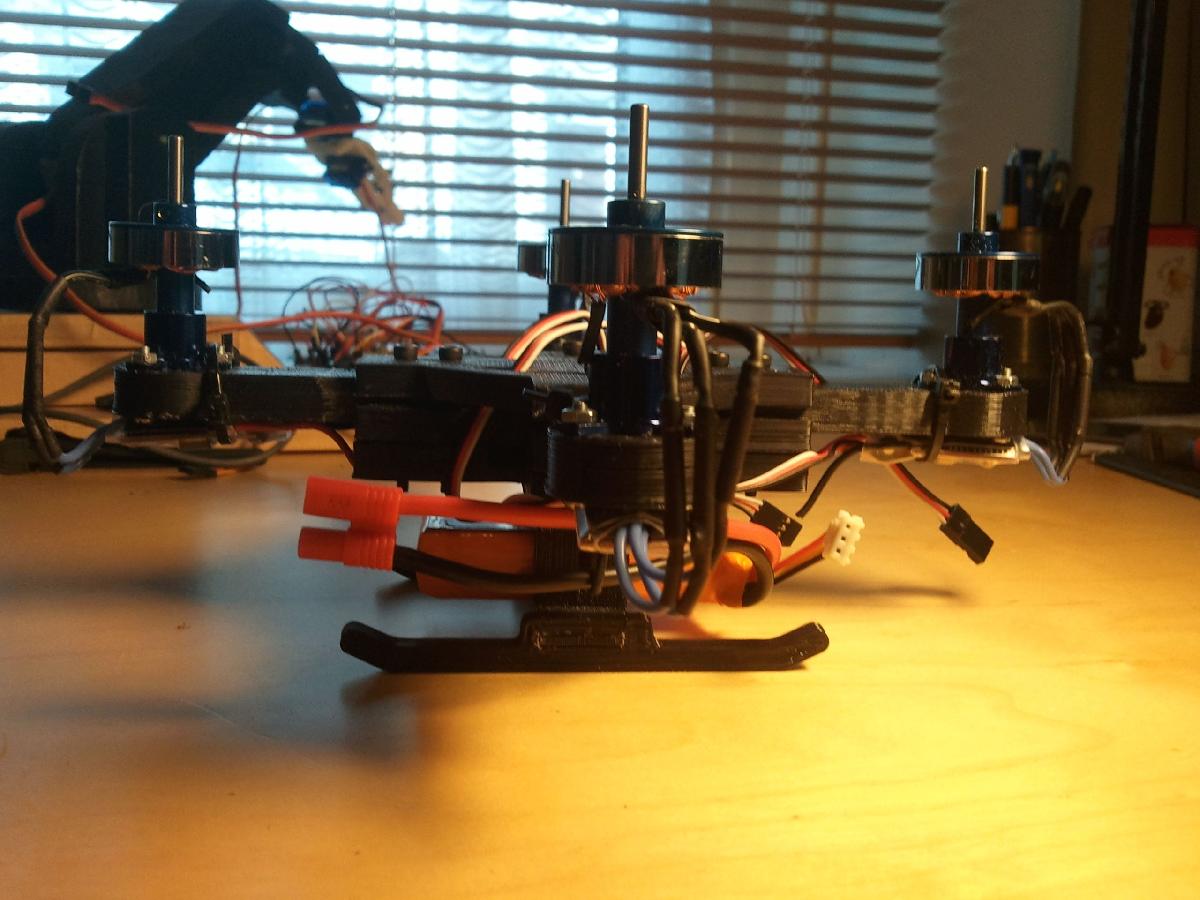
Bodgie o Pequeno Quadricoptero foi projetado para Impressora 3D. Este e um design de estrutura de quadricoptero totalmente parametrico e totalmente imprimivel feito com o Inventor. Com este design, voce pode imprimir um quadricoptero com uma distancia de motor a motor de 160-260mm, dando espaco suficiente para acomodar helices de 101,6mm (4) a 177,8mm (7).Motivacao: Eu queria construir um quadricoptero que eu pudesse usar para aprender, um requisito basico disso sendo que eu preciso ser capaz de conserta-lo com custo e dificuldade minimos. Entao, e um bom trabalho que eu tenho uma impressora 3D!Rascunho: Comecei este design com a intencao de comprimir toda a eletronica no centro da area do hub, no mesmo plano que os bracos. Completei um rascunho com isso em mente, mas nao fiquei feliz com a quantidade de plastico que consumiu e tambem nao havia pensado em como eu iria passar os cabos ao redor da estrutura. Alem disso, baseei o design em dimensoes chutadas, sempre precisaria de algum tipo de retrabalho.Revisao 1 (Ilustrada): O design do rascunho me deu algumas boas ideias para seguir em frente, tambem me deu a confianca para comprar as pecas que eu precisaria para eventualmente colocar isso no ar. Para esta revisao, movi a eletronica para um local mais padrao em cima da area do hub. Existem furos de fixacao para a eletronica em um quadrado de 45mm ao redor do centro, isso pode ser variado. Outra dimensao variavel e a distancia de motor a motor, que para esta revisao esta definida em 180mm permitindo uma helice de 10,16-12,7mm (4-5).Com esta revisao, pensei um pouco sobre a passagem de fios e criei a camada de energia. Este componente se empilha com o hub do quadricoptero e permite que os ESCs e a bateria se conectem a estrutura. Muitos quadricopteros sofrem do problema do monstro de espaguete voador, esta solucao ajuda a aliviar isso.Este e o design que eu imprimi, como se ve, eu estava sendo um pouco ambicioso com o tamanho da helice, considerando tudo, pesa cerca de 450g. Eu calculo cerca de 600g de empuxo com esta configuracao, o que significa que tera que funcionar a mais de 3/4 do acelerador para voar. Embora nao seja um impedimento, certamente vai sobrecarregar os motores e os ESCs, e duvido que sera manobravel.O trem de pouso tambem foi adicionado, nao tenho certeza de como ele vai se comportar, mas certamente parece estar a altura.Revisao 2: Este design incorpora algumas licoes que aprendi com a revisao anterior. Os bracos sao mais finos, tornando-os mais leves por unidade de comprimento e permitindo tamanhos de helice maiores de ate 177,8mm (7). Os bracos mais finos tambem significam que a area do hub usa menos plastico, economizando mais peso. A espessura minima de todos os componentes tambem foi reduzida ligeiramente na tentativa de remover um pouco mais de plastico redundante. Devido a possibilidade de helices maiores, espero alcancar mais de 1kg de empuxo com este design, proporcionando um desempenho muito mais aceitavel.Dimensoes Principais:motor_a_motor = Distancia entre os centros dos motores, dita o comprimento do braco que e limitado pelo tamanho da plataforma de construcao.largura_do_braco = Autoexplicativoaltura_do_braco = Autoexplicativoquadrado_de_fixacao = O comprimento do lado do quadrado cujos cantos estao no centro dos furos de montagem.quadrado_do_hub = Largura do hub.gap_de_compressao = Largura do espaco entre os componentes superior e inferior do hub.espessura_de_poder = A espessura maxima do seu circuito de distribuicao de energia.largura_da_bateria = Autoexplicativoespessura_da_bateria = Autoexplicativocobertura_estrutural = A espessura minima de qualquer secao.Por favor, observe, eu ainda nao voei com isso. Eu pedi um receptor que era incompativel com meu transmissor e estou esperando um substituto da China (que pena). Eu atualizarei isso com fotos e, espero, videos quando eu conseguir as ultimas pecas no lugar.Estou aberto a sugestoes sobre como posso melhorar ainda mais este design. Avancando, vou experimentar diferentes espessuras na tentativa de encontrar um bom equilibrio entre peso e resistencia.Suplemento de EletronicaAlgumas informacoes sobre a eletronica foram solicitadas. Ha uma quantidade enorme de opcoes a esse respeito, voce precisa decidir sobre uma unidade de controle e um sistema de acionamento. Para minha unidade de controle (nao ilustrada), eu uso um Arduino nano, uma placa de sensor tudo em um que pode ser encontrada no eBay, e um receptor de 6 canais Fly Sky (FS-R6B) para acompanhar meu transmissor Fly Sky (FS-TH9X). Tal sistema de controle funcionara para qualquer configuracao de quadricoptero. O sistema de acionamento depende do peso do quadricoptero e do diametro maximo de helice permitido, essa escolha nao e trivial e sugiro que voce visite alguns foruns de quadricopteros onde encontrara uma enorme quantidade de conselhos e sugestoes.Ha uma riqueza de informacoes adicionais em Aeroquad.com e multiwii.com
Não deixe de imprimir e compartilhar este modelo 3d. Não deixe sua impressora 3D parada. Mas se você não tem uma impressora 3D ainda, escolha a sua agora.