
Imprimir STL Barrebot v1.0 c803032ec0fd70e1a9af9ff9bb182402 Modelo 3D - 2438496
Things 3D Fila
Barrebot v1.0 c803032ec0fd70e1a9af9ff9bb182402
Robótica
Se você ainda não tem uma máquina para imprimir este arquivo pode comprar uma impressora 3d aqui!
Você pode imprimir este modelo 3d com estes filamentos ou com estas resinas 3D.
Sobre o objeto 3D Barrebot v1.0 c803032ec0fd70e1a9af9ff9bb182402
Este é um arquivo desenvolvido e projetado com ferramenta CAD.
Se você ainda não sabe criar seu próprio modelo 3D eu te ensino neste artigo tutorial sobre Tinkercad.
Barrebot v1.0 c803032ec0fd70e1a9af9ff9bb182402 foi projetado para Impressora 3D. barrebot
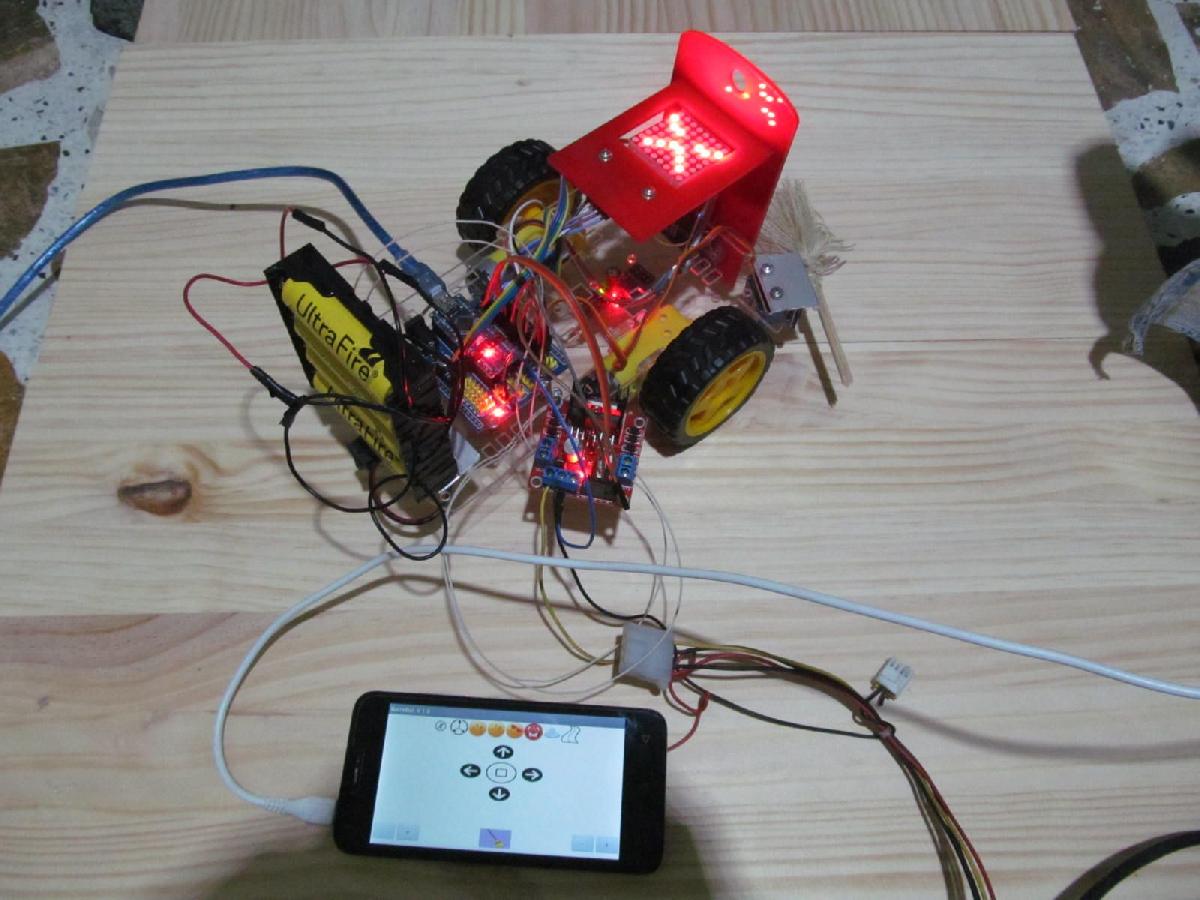
### Barrebot v1.0: Um Robô Aspirador Educativo Para ResidênciasNa era da tecnologia e inovação, o design de robôs educativos é uma maneira eficaz de engajar jovens e adultos em conhecimentos de engenharia, programação e robótica. O Barrebot v1.0 é um projeto inovador que exemplifica essa ideia, servindo como assistente doméstico para varrer e aspirar o piso de uma residência. Este robô possui um design que combina estética, funcionalidade e desafios técnicos, tornando-se uma ferramenta valiosa para aqueles que desejam explorar o mundo da robótica em um ambiente prático e educativo.
#### Design Estrutural do Barrebot
A primeira fase do desenvolvimento do Barrebot envolveu o design das peças que compõem a montagem do robô. O autor do projeto utilizou o software Tinkercad para criar as partes principais do robô. O componente frontal do robô é fundamental, abrigando sensores ultrassônicos que permitem que o robô navegue pelo ambiente, detectando obstáculos e ajustando seu caminho conforme necessário. Além disso, uma segunda peça que se acopla à parte superior do robô foi projetada para acomodar uma matriz de LEDs, que não apenas serve como um elemento estético, mas também pode ter funções de feedback visual durante a operação.
O design cuidadoso das peças é crucial não apenas para a estética, mas também para a ergonomia do robô — cada componente foi escolhido para garantir que o robô pudesse ser facilmente montado e mantido.
#### Materiais Utilizados na Montagem
Após o design, o próximo passo foi a aquisição e o corte das peças necessárias. As partes que constituem a base do robô foram compradas no comércio; estas peças foram escolhidas para assegurar durabilidade e resistência. A montagem das partes foi complementada com a inclusão de elementos reciclados, como alumínio, que foram utilizados para criar suportes. Essa abordagem sustentável é um aspecto positivo do projeto, pois demonstra a viabilidade de usar materiais recicláveis na robótica.
Um ponto interessante é a escolha dos suportes de placa de PC reciclados para a base da placa Arduino. O uso de componentes reciclados não apenas reduz o custo do projeto, mas também permite que os designers aprendam a importância da sustentabilidade no design de produtos.
#### Montagem Eletrônica e Conexões
Uma das etapas mais complexas envolveu a montagem da eletrônica no interior da base do robô. O autor realizou testes com os componentes eletrônicos utilizando exemplos da plataforma Facilino, que é uma ferramenta de aprendizado e prototipagem para Arduino. As conexões foram montadas de acordo com o design visualizado no software Fritzing, que facilita a compreensão das ligações elétricas e a disposição dos componentes.
O uso de servomotores foi modificado para motores DC, o que trouxe novas demandas quanto ao controle de movimento. Para gerenciar esses motores, foi utilizado um driver L298N, que permite controlar a velocidade e a direção dos motores DC de forma eficiente.
Esses testes preliminares são essenciais para garantir que cada componente esteja funcionando adequadamente e que o robô esteja pronto para operações mais complexas, como a navegação autônoma.
#### Desenvolvimento do Software Utilizando Arduino e APP Inventor
A programação do Barrebot v1.0 foi realizada utilizando a plataforma Arduino, juntamente com o APP Inventor, que permitiu a criação de uma interface gráfica para controlar o robô. A aplicação foi projetada para facilitar o acesso a diversas funcionalidades, como troca de faces do aplicativo, acesso via Bluetooth e controle do acelerômetro.
Essas inovações proporcionam um controle intuitivo do robô, permitindo que os usuários possam manipular a direção dos motores e controlar a escova que se eleva e desce, enfatizando a interação do usuário. Contudo, o autor enfrentou alguns desafios, como a implementação do sistema de "seguida-linhas" que ainda não foi implementado.
As dificuldades encontradas no desenvolvimento são parte do processo de aprendizado. Por exemplo, o autor mencionou que os motores DC não estavam funcionando com a mesma força, resultando em um movimento descontrolado do robô. Esse problema ilustra a importância dos testes e ajustes no design e programação do robô, algo que é essencial para qualquer projeto de engenharia.
#### Considerações sobre Eficiência Energética
Um aspecto importante que foi destacado pelo autor é o consumo elevado de energia do robô, que se torna um fator significativo a ser considerado no design do Barrebot. Durante os testes, o robô apresentou falhas devido à baixa carga nas baterias, exigindo que ele fosse alimentado via cabo USB conectado à rede elétrica. O autor observou que isso poderia afetar a autonomia do robô durante o uso.
O consumo de energia em robôs móveis é um desafio comum e oferece uma oportunidade para explorar soluções inovadoras, como a utilização de baterias mais potentes ou sistemas de recarga automática que permitam que o robô retorne à base de carregamento quando a energia estiver baixa.
#### Conclusões e Futuras Melhorias
O projeto Barrebot v1.0 é uma abordagem interessante e educacional no campo da robótica. Ele combina elementos de design, engenharia elétrica e programação para criar um robô funcional que pode ajudar nas tarefas domésticas. A experiência adquirida pelo autor ao longo do projeto é inestimável, pois cada etapa do desenvolvimento oferece lições sobre resolução de problemas, trabalho em equipe e inovação.
Futuramente, há várias melhorias que poderiam ser implementadas no Barrebot. A inclusão de sensores adicionais para melhorar a navegação, um sistema mais eficiente de controle de motores e métodos para otimizar o consumo de energia são algumas das áreas de desenvolvimento. Além disso, a programação do sistema de seguida-linhas e a automação do robô para que ele realize a sua função de varrer de maneira mais eficaz são objetivos que podem ser alcançados em versões futuras.
Por fim, o Barrebot v1.0 não é apenas um robô educativo; ele representa a confluência de design, funcionalidade e aprendizado prático, exemplificando como a tecnologia pode ser usada para inovar nas atividades do dia a dia de forma sustentável e educacional.
Não deixe de imprimir e compartilhar este modelo 3d. Não deixe sua impressora 3D parada. Mas se você não tem uma impressora 3D ainda, escolha a sua agora.